Special Interest Group
in Intelligent Systems & Human Computer Interface (SIG-IS &HCI)
![]()
Working project:
Bio-inspired self-organization intelligent robotic system
Grant manager:
Associated Professor Dobrea Dan, M.Sc., Ph.D
This research is supported with the help of:
Romanian National Council for Research in High Education grant
Budget:
264,850 EUR
Research team:
Sirbu Adriana, Fira Monica, Dobrea Monica Claudia, Chiper Rodica
Short Descriptions of the Project
The
human motor system has a hierarchical organization with different control
levels that receive specific sensorial information. The muscular proprioceptors
and the receptors from the vestibular system inform (especially at the
low motor control levels) the central nervous system about the locomotor
mechanics and the body posture. The tactile, visual and auditory information
is mainly used by the high control/command levels of the human motor system.
Human motor system requires a training time interval for executing a specific
motor program (e.q. walking), followed then by a systematic adaptation
to the changing of the human living system's parameters and of the environment
characteristics.
This research project aims to design and to implement
an intelligent, bio-inspired and with auto-organization robotic system
(SrBio) that will be capable to control the movement dynamics (MD) and
to obey the successive hierarchical subordination principle that characterizes
the human motor system. Thus, SrBio will learn (in an adaptive manner,
through a continuing auto-organizing process) to move by avoiding the
obstacles and by using for this only the local environment representation
provided by the sensors. The movement command for the SrBio will be given
by a subject (more exactly, by his cortical activity) through out a brain
computer interface (BCI) system. SrBio will execute this global command
but having concurrently a local autonomy (it does not receive a details
command in order to avoid the local obstacles). SrBio will achieve a double
integration: that of the global command and that of the local control
of the movement dynamics. This integration is required in order to execute
the global command based on the local autonomy which relieves the BCI
by the md details command, thus improving the performances. Due to the
interdisciplinarity of the project we will seek to simultaneously develop
new types of invertors, to test and to utilize new classes of sensors
and to find new algorithms for improving the BCI's performances.
2010:
First Stage - the goal is to build:
|
|
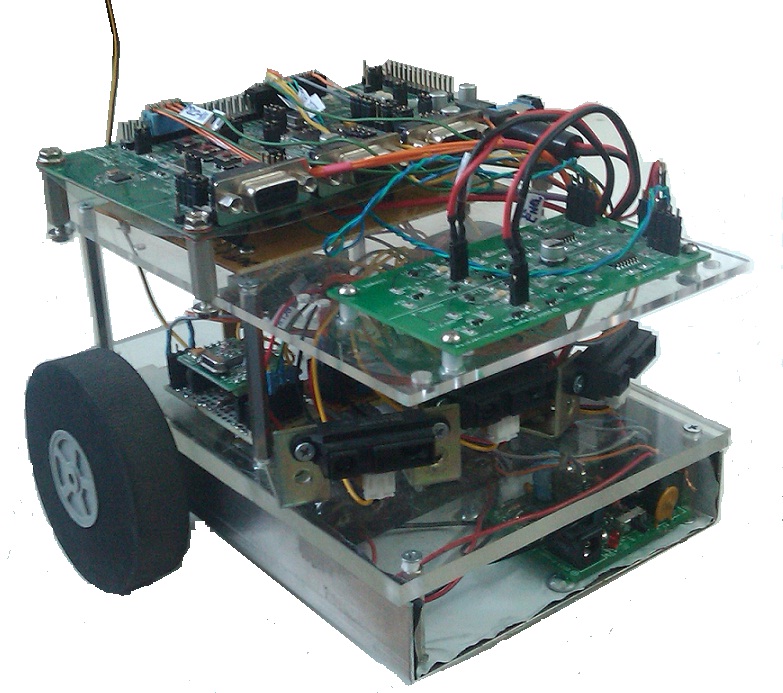
Microcontroler implementation |
FPGA implementation |
 |
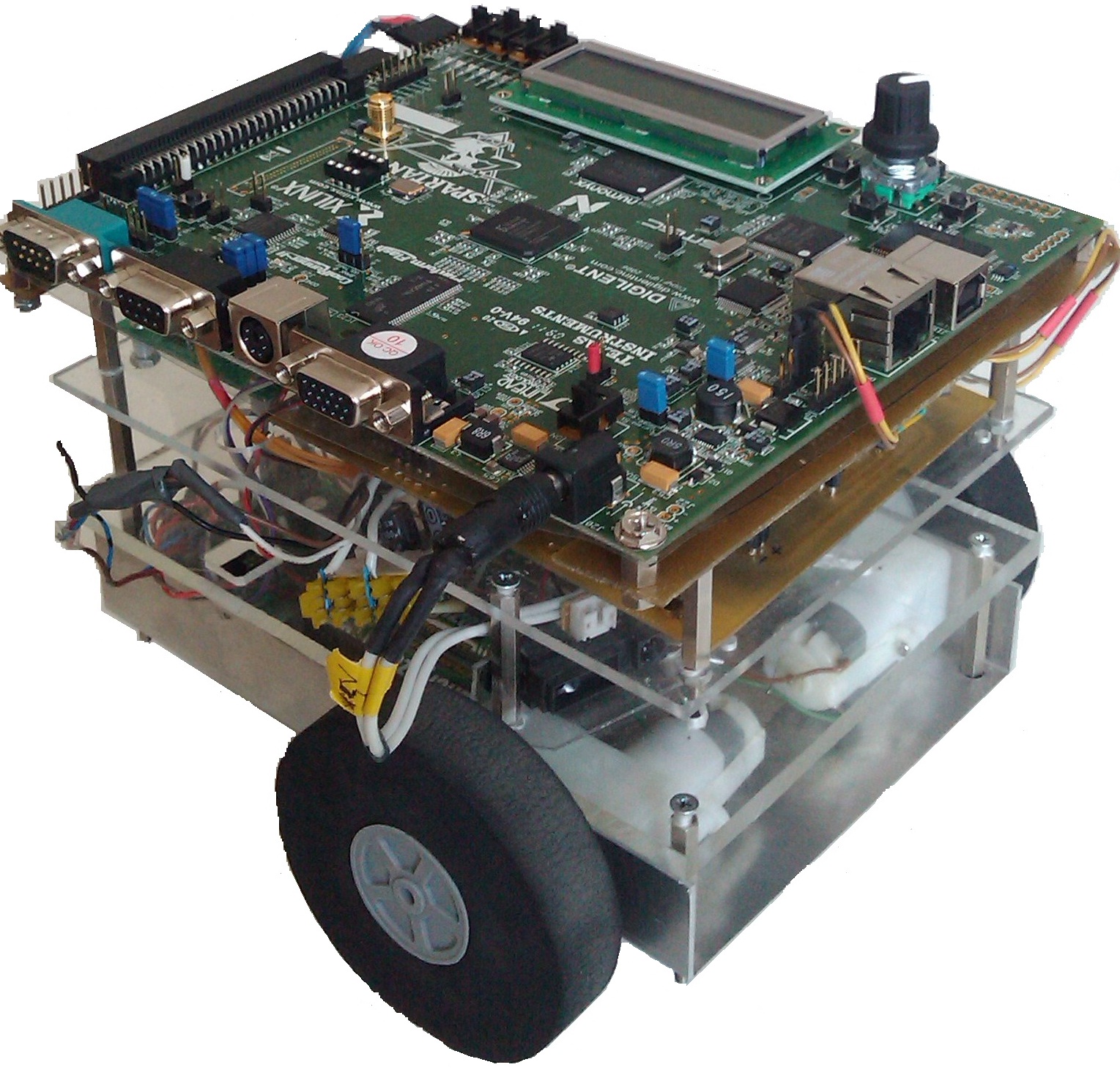 |
In all following videos the robot starts the learning process base on a random initialization of all the neural networks weights. |
|
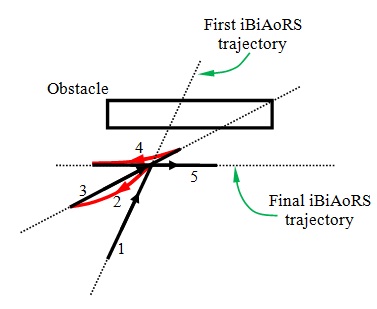
One of the first behaviors obtained with iBiAoRS is presented in following Figure. The robot movement dynamics consisted in avoiding an imminent collision based on the following successive movements: when the robot came closed enough to an obstacle (in sensor active range), the trajectory 1 in Fig. 5, it stopped and, after that, it took quickly back, making in the same time a slightly rotation, trajectories 2 and 4 in Fig. 5. The autoRobot repeated these actions several times until it was able to have a clear path, without any kind of obstacle - trajectory 5 in Fig. 5 –, in front of it.
See the first demonstration video and |
|
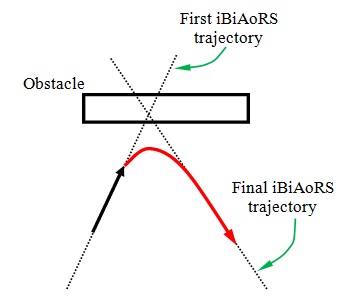
Another learned movement behavior was similar with the one of a ball that smash in a wall at an angle different of 90º. The main difference is given by the fact that the iBiAoRS does not touch the obstacle, see the following Figure. Based on this type of behavior the iBiAoRS learned a smooth trajectory.
|
|
Second Stage - the aim is to design and implement:
|
|
 |
|
| In this video, based on learned behavior, the robot proves its ability to plan and to execute (independently from a human operator) a collision-free motion within its environment. | |
In this final video we presented a remotely radio controlled robotic system able to self-organize and auto-evolve to a behavior that allows for sensing, reasoning and acting – all these in order to avoid all the obstacles from the immediate proximity. |
|
2009:
2009 grant report (in romanian language)
Papers:
- Dan Marius Dobrea, Monica-Claudia Dobrea, EEG Classification System – From an Universal System Implementation to a Particular Signal Modeling, Proceedings of the Romanian Academy - Series A: Mathematics, Physics, Technical Sciences, Information Science, Vol. 10, Nr. 2, May–August 2009, pp. 197-204, ISSN 1454-8267 (download paper)
- Dan Marius Dobrea, Monica Claudia Dobrea, A study on mental tasks discriminative power, International Symposium on Signal Processing, Image Processing and Pattern Recognition (Eds. Y.-h. Lee et al., book title „Future Generation Information Technology”, Series „Lecture Notes in Computer Science”, vol. 5899, 2009, ISBN 978-3-642-10508-1, ISSN 0302-9743 (Print) 1611-3349 (Online), editura: Springer-Verlag Berlin Heidelberg), December 10-12, 2009, Jeju Island, Korea, pp. 61-68, Springer – DOI: 10.1007/978-3-642-10509-8 (download paper)
- Dan Marius Dobrea, Monica Claudia Dobrea, The concept of an intelligent, bio-inspired and brain controlled robotic system, 9th International Conference on Information Technology and Applications in Biomedicine, November 5-7, 2009, Larnaca, Cyprus, ISBN 978-1-4244-5379-5 (download paper)
- Monica Claudia Dobrea, Dan Marius Dobrea, The selection of proper discriminative cognitive tasks – a necessary prerequisite in high-quality BCI applications, 2nd International Symposium on Applied Sciences in Biomedical and Communication Technologies, ISABEL 2009, November 24-27, 2009, Bratislava, Slovak Republic, pp. 1-6, ISBN: 978-1-4244-4640-7, IEEE Xplore (http://ieeexplore.ieee.org) - DOI: 10.1109/ISABEL.2009.5373706 (download paper)
- Dan Marius Dobrea, Monica Claudia Dobrea, Optimisation of a BCI system using the GA technique, 2nd International Symposium on Applied Sciences in Biomedical and Communication Technologies, ISABEL 2009, November 24-27, 2009, Bratislava, Slovak Republic, ISBN: 978-1-4244-4640-7, IEEE Xplore (http://ieeexplore.ieee.org) - DOI: 10.1109/ISABEL.2009.5373673 (download paper)